
Contents
Motivation
It was a coincidence that a Ph.D. student attached to our NUS UAV rearch group for one year doing his own research. He told me that he has an ambition and motivation to start his own career in the area of UAV, especially in the area of tiny palm-sized aerial vehicles. It is quite popular for pre-primary school education in China that the high tech stuff like coding and simple hardware projects were introduced to the daily courses.
At that time, there were a lot of UAV companies in China, and several of them dominated the whole consumer market, such as DJI and ZeroTech. Till now, DJI is still the No.1 in drone consumer market and it was quite difficult, even impossible to start up such a company and compete with them. Thus, most of the other companies share the remain market, which is more B2B and service and customization oriented.
The status makes us think about a reasonable business plan to avoid direct competition with large corporations. At that time, using drones for education, especially pre-school education was not popular, at least no companies have chain business in different provices. This might be a blank area and we can fill them in with our UAV technologies.
Below is a video trailer showing my friend’s thoughts and motivation.
Start-up
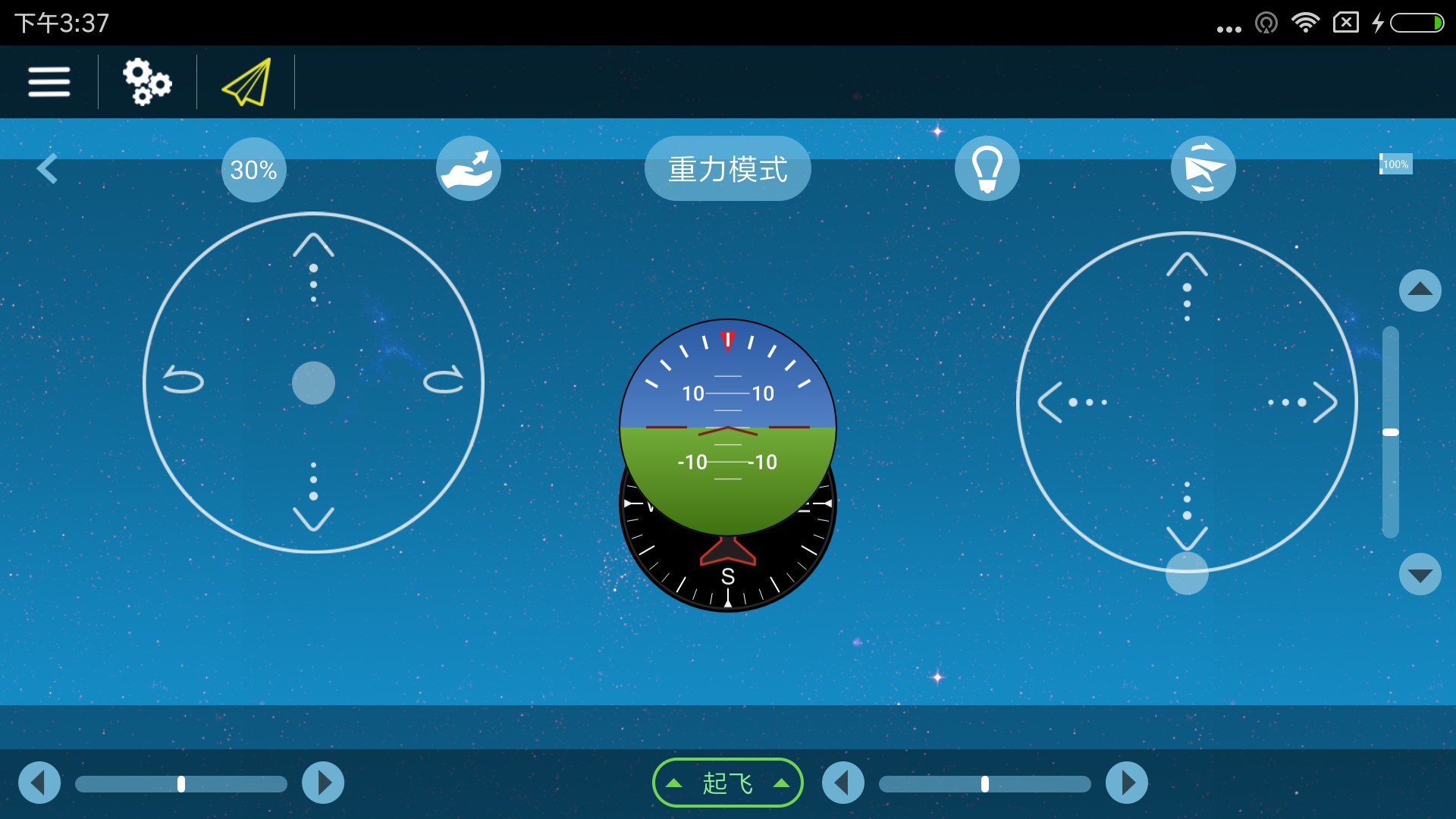
The Initial scale is quite small and we only got 5 persons. Me myself is more on platforms and firmwares. My friend focused on the ground control station design based on Android and iOS platforms. Another one specialized in website design, server construction, as well as Java based GUI design. The fourth one focused on the overall frame design, mechanical structure, and product design. The last one is more on marketing and sales.
With such an initial team, we start our first step by proposing a demo to some government funding agencies and other funding agencies to sell our idea. In the December 2016, we have our first 300,000 CNY funding from Nanjing Government as well as NUAA (Nanjing University of Aeronautics and Astronautics).
Hardware Versions
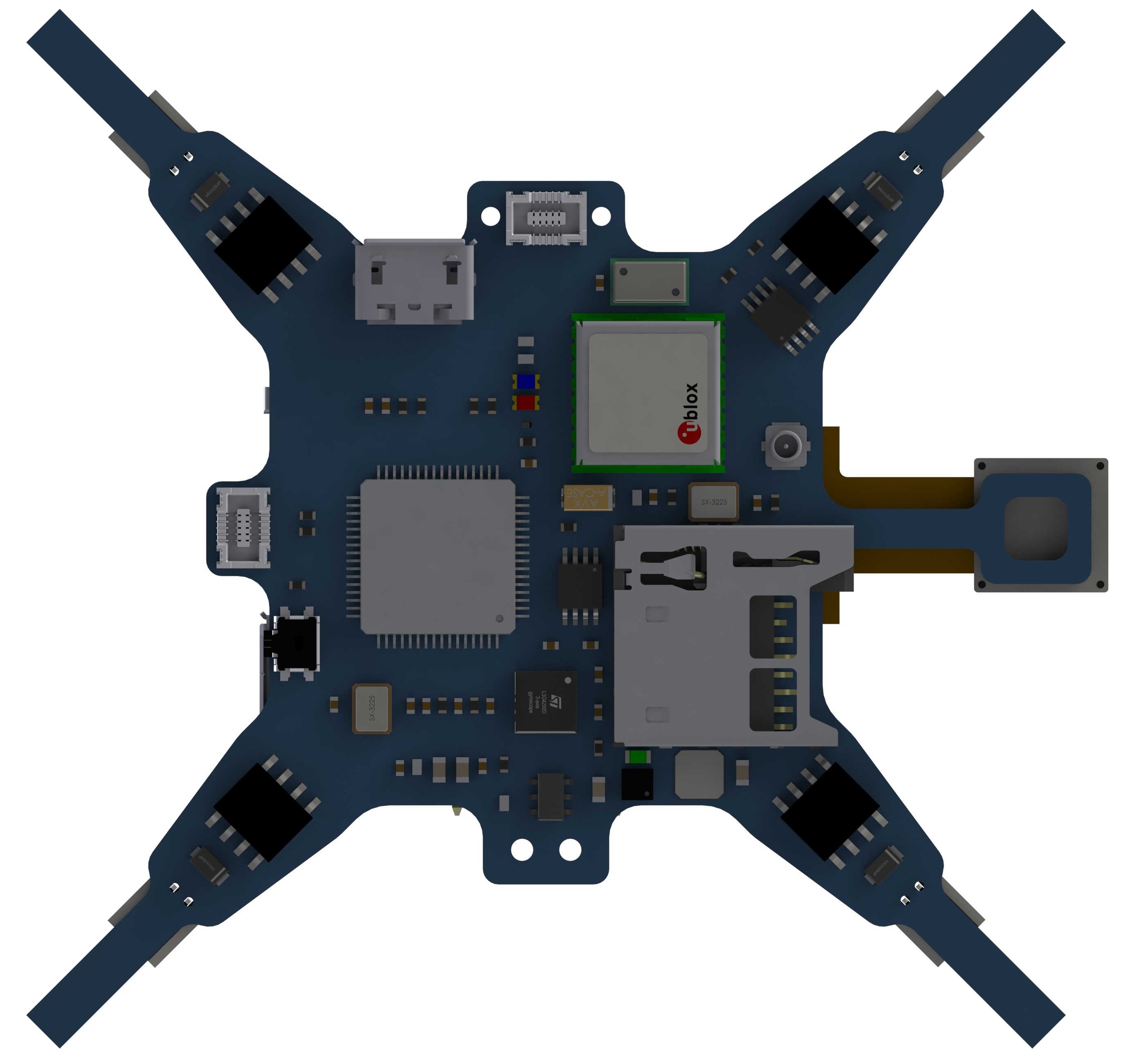
Version One
The first version was brute-force integration with my existing research resources. Some of the main features are:
- Dimension: Tip-to-tip dimension is 12 cm;
- Weight: overall take-off weight with a 10 gram 350 mAh battery is 45 gram;
- Autonomous level: able to perform indoor positioning with optical flow and outdoor positioning with GPS u-blox module;
- Problems: not able to be controlled with mobile phone or tablets; not able to re-charge battery on-board;
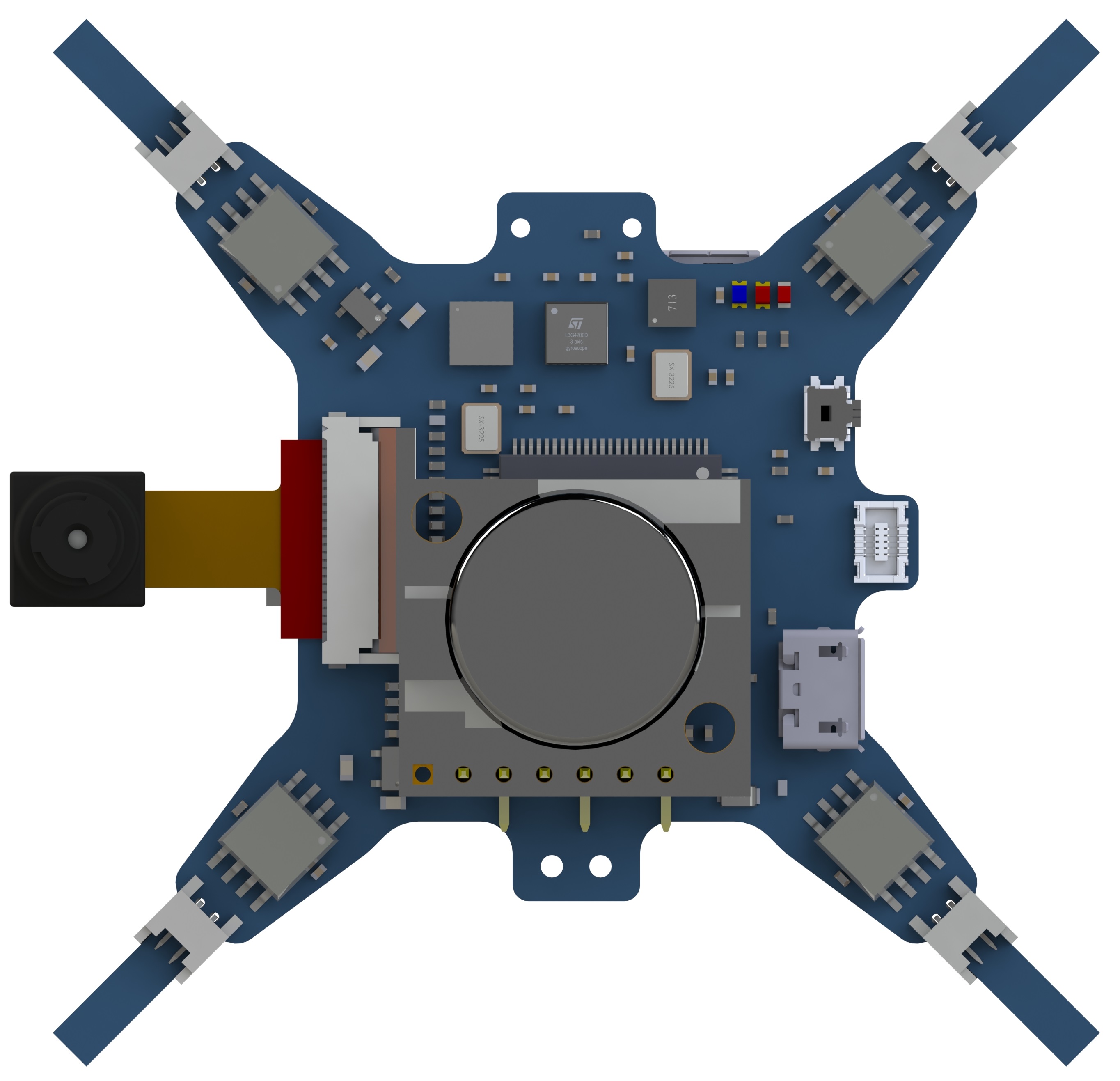
Version Two
From the first to second version, the platform has undergone several sub-versions (will not be shown here) to fix each small bugs and eventually to the following version. We had this stable version with its firmware as well as the ground control station software to propose the demo and got the funding.
Main Features
- Dimension: Tip-to-tip dimension is 12 cm;
- Weight: overall take-off weight with a 10 gram 350 mAh battery is 29 gram;
- Autonomous level: able to perform outdoor positioning with GPS u-blox module;
- Other features: controllable with mobile phone or tablets; able to perform flip motion; able to throw and fly.
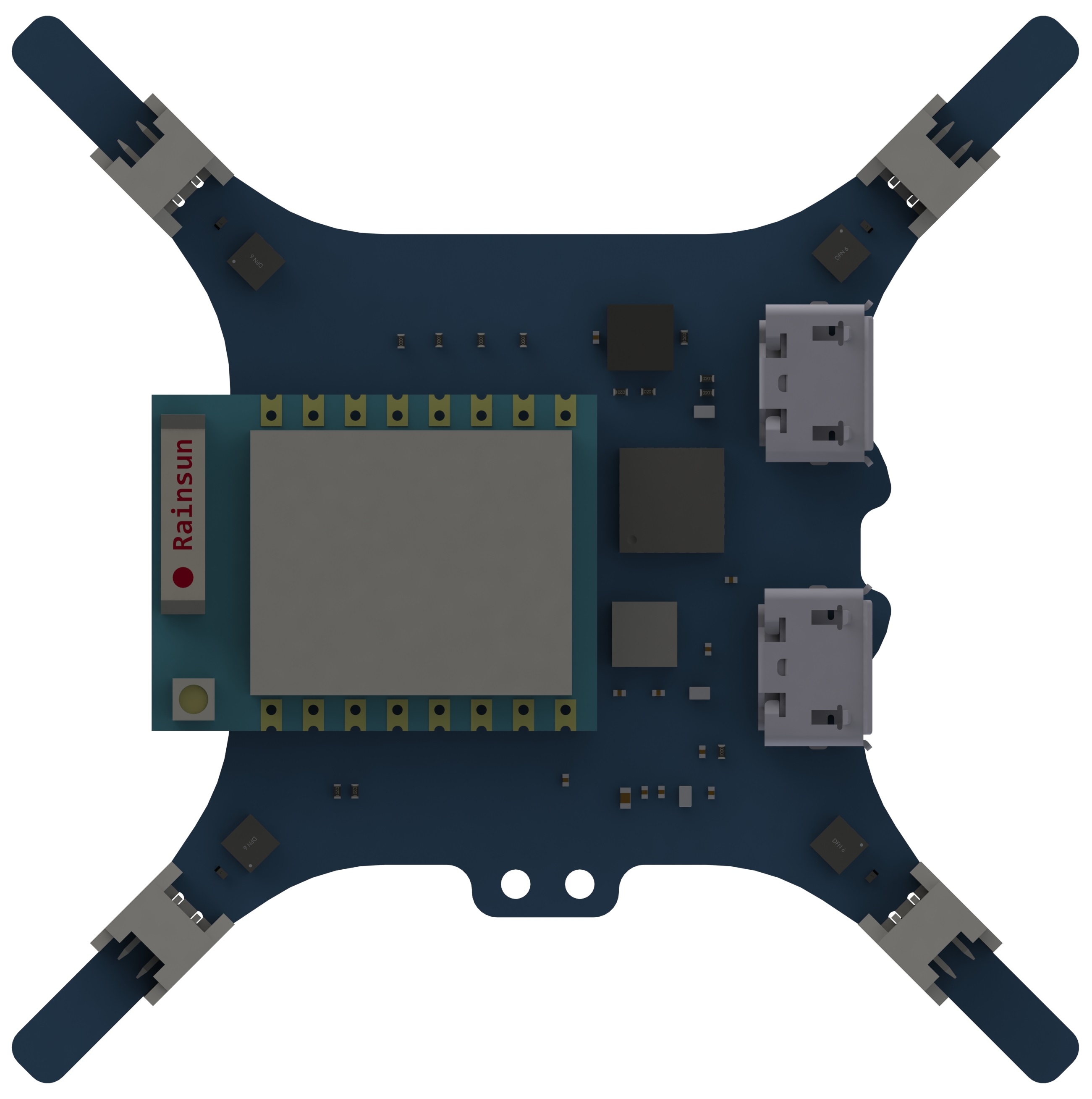
Version Three
The third version considers the detailed production and cooperation with the mechnical frame and structural issues. Below is the 3.0 version, catering for indoor navigation purpose.
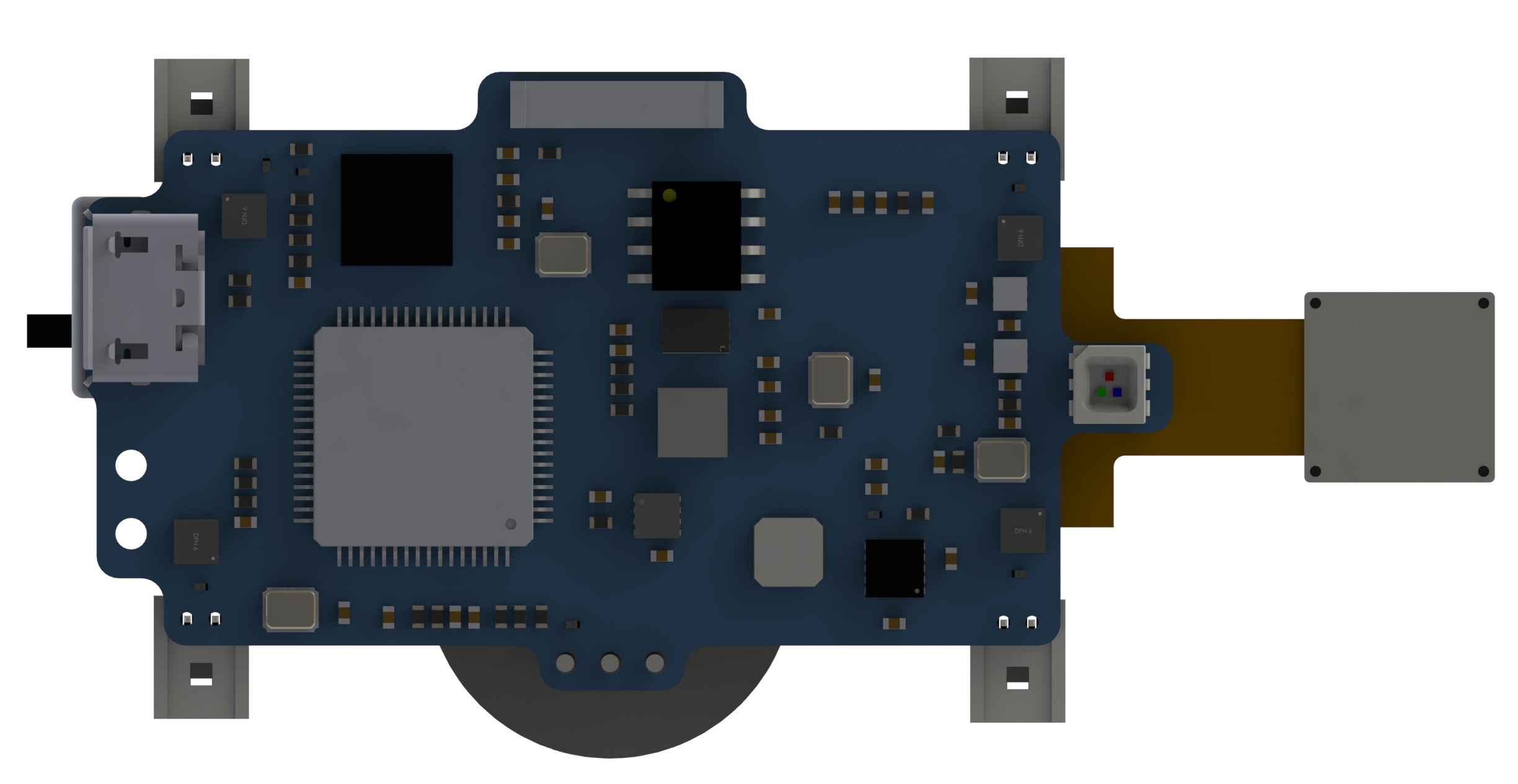
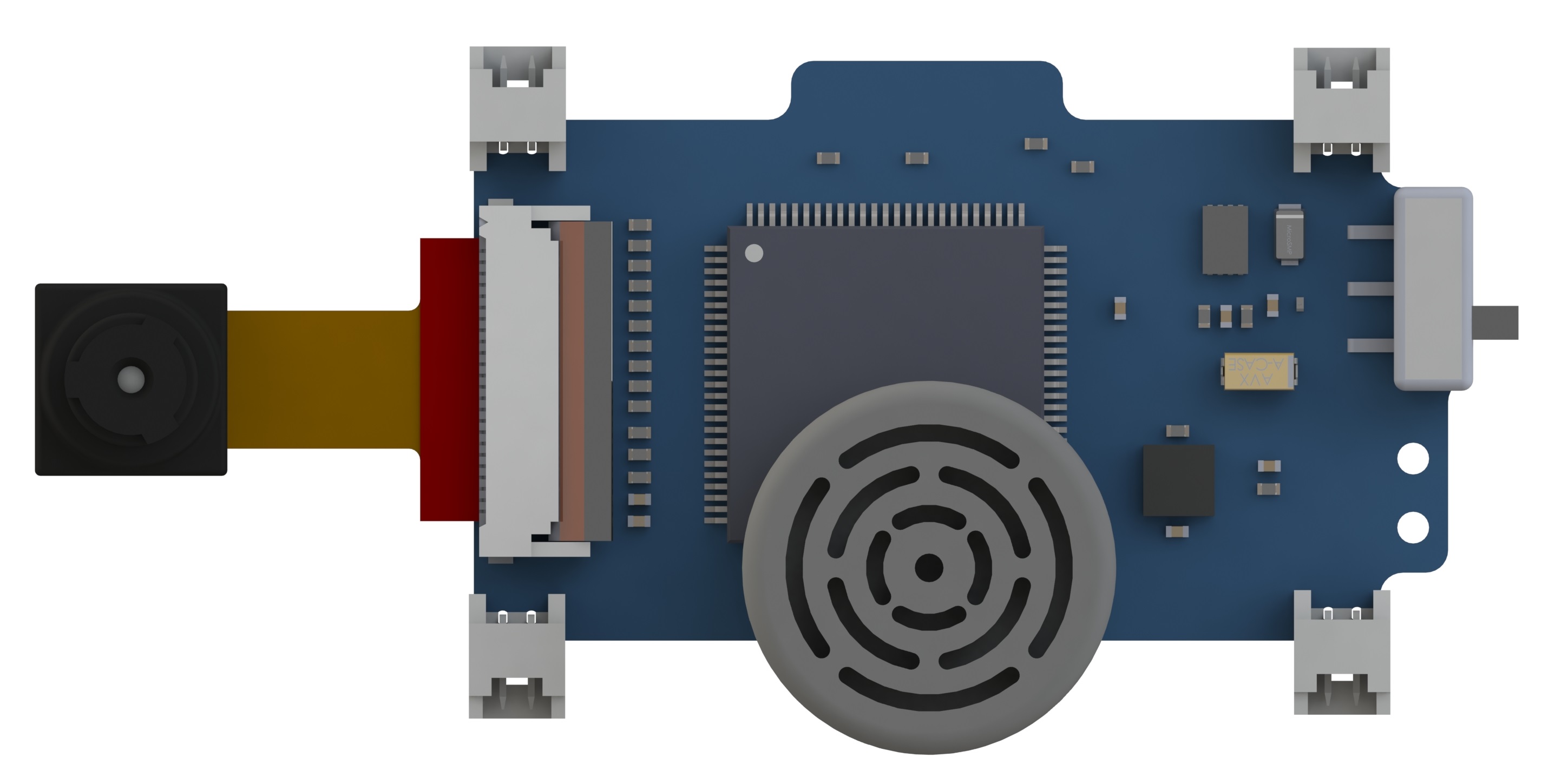
Main Features
- Dimension: Tip-to-tip dimension is 14 cm;
- Weight: overall take-off weight with a 10 gram 350 mAh battery is 66 gram;
- Thrust: upgrade to large motor and propeller combo for larger thrust and carrying more payloads.
- Autonomous level: able to perform indoor positioning with optical flow module;
- Other features: controllable with mobile phone or tablets; able to perform flip motion; able to throw and fly; able to re-charge battery without pulling battery out.
To be continued…
For future development, more adaptive modules such as LED light panels, buzzer module, disassembly and re-assembly features catering for more funny and interesting functions to be used on the courses. Corresponding teaching materials will also be made.
My friend will start the company this April and I will be the technical consultant and support.